Agents
Introduction
EinTeil der allgemeinen Lektion der Natur ist das Verständnis, wie Ordnung und Chaos zueinander in Beziehung stehen. [ Alan Powers, Natur und Design S. 33 ]
Exercises
Particle to Agent
Get the Code: agents_1.pde
Get the Code: agents_2.pde
Get the Code: agents_3.pde
Get the Code: agents_4.pde
Waiting for a Target
Get the Code: agents_5.pde
Left mouse button: Target = Mouse position
Right mouse button: Target = Random
Get the Code: agents_6.pde
The Agents eat the food. After they have eaten everything they return to their normal behavior.
Movement

Get the Code: agents_moverandom.pde
Es gibt zwei Listen / Arrays. Die eine Liste enthält die Partikel in einer bestimmten Reihenfolge. Das andere Array wird extern erstellt und enthält die neuen Zielkoordinaten für die Partikel. Diese Zielkoordinaten wurden über einen Zufallsalgorithmus generiert und sind unsortiert. In der einfachen updateversion wird dem ersten Partikel des Arrays die erste Zielkoordinate übergeben, dem zweiten die zweite Zielkoordinate usw. Dadurch ensteht eine chaotische, scheinbar planlose Bewegung. Einige Partikel haben einen langen Weg, um ihr Ziel zu erreichen; einigen einen kurzen.
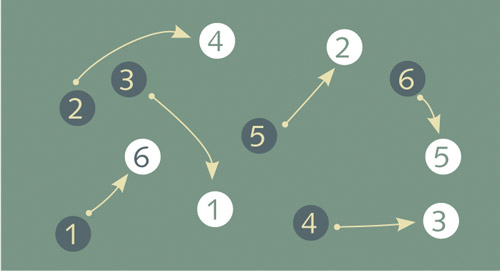
Get the Code: agents_movesorted.pde
Es gibt zwei Listen / Arrays. Die eine Liste enthält die Partikel in einer bestimmten Reihenfolge. Das andere Array wird extern erstellt und enthält die neuen Zielkoordinaten für die Partikel. Diese Zielkoordinaten wurden über einen Zufallsalgorithmus generiert und sind unsortiert. Anstatt dem ersten Partikel die erste Zielkoordinate zu übergeben, wird in der gesamte Zielliste nach dem Ziel mit der geringsten Distanz gesucht und dem Partikel zugeordnet. Für den zweiten Partikel wird wieder der nächst stehende Punkt gesucht, mit dem unterschied, dass es jetzt ein mögliches Ziel weniger ist, da dieses schon für den ersten Partikel vergeben wurde. Auf diese Weise wird die Anzahl der Zielpunkte immer weniger, bis der letzte Partikel in dem Array einfach die letzte, übrig gebliebene Koordinate zugewiesen bekommt. Durch dieses Verfahren entsteht eine kontrolliert aussehende Bewegung, da jeder Partikel einen möglichst kurzen Weg zurück legen muss.
Image based Targeting

Links
- Software Agent Defintition > en.wikipedia.org: Software Agent
-
Autonomous Agents >
natureofcode
.com/ book/ chapter- 6-auto nomous- agents/ -
Image based Targeting >
www.
openprocessing .org/ sketch/ 81905